типы датчиков и принципы работы
Тахеометр — устройство, которое используется для измерения углов и расстояний, для определения координат на местности, тригонометрического нивелирования и решения других топогеодезических задач. По своему функционалу прибор датчик объединяет функции двух устройств — светодальномера и теодолита.
Современные дальномеры имеют узконаправленный коаксиальный лазерный луч, что даёт возможность выполнять угловые измерения точно до цели даже через листву.
Изначально тахеометры представляли собой полуэлектронное оборудование, совмещающее светодальномер и теодолит. С развитием технологий эти два прибора удалось совместить в одном корпусе. Полностью электронный прибор позволил автоматизировать работу специалистов и получать более точную информацию.
Принцип действия электронного тахеометра
Особенности работы датчика дальномера зависят от метода измерения:
- фазовый метод — определение расстояния выполняется за счет вычисления разности фаз излученного и отраженного луча;


Современные приборы могут применять разные методы измерения. Основные параметры: дальность и точность измерений углов и расстояний.
Существует отражательный и безотражательный режимы работы измерения расстояния. В первом случае для работы используется отражатель и дальность работы составляет до 10 километров. Тахеометр в безотражательном режиме обеспечивает работу в пределах 1 километра. Угловая точность варьируется от 5 до 0,5 угловой секунды.
Классификация датчиков
В зависимости от разных критериев оценки тахеометры подразделяются на категории:
- точные и технические;
- строительные, технические, инженерные;
- отражательные и безотражательные.
В зависимости от категории тахеометра различаются технические возможности. Среди наиболее функциональных приборов стоит выделить оборудование инженерного типа, которое обладает развернутыми возможностями для решения широкого круга задач.
В основе измерительного прибора находится лазерный дальномер, который обеспечивает регистрацию линейных расстояний и превышений. Датчики угловых измерений для тахеометров обладают высокой чувствительностью.
Датчики угловых измерений для тахеометров обладают высокой чувствительностью.
Устройство измерительного прибора состоит из трех частей — оптической, механической и электронной. Отличием от теодолитов является наличие двух важных элементов — светодальномера с фазовым и импульсным способами определения дальности и вычислительного устройства с ПО и возможностью отображения информации на экране.
3D система с роботизированным Тахеометром для автогрейдеров
Применение:
- подготовка к укладке асфальта
- строительство и расширение дорог
- строительства аэропортов и ВПП
- точное профилирование для последующей заливки бетоном и установки плит
- подготовка площадок под коммерческое строительство,
Чистовая обработка / профилирование с точностью несколько мм за меньшее количество проходов
то есть тогда, когда требуется самый высокий уровень точности !
Принцип работы и применение подробно
Принцип работы:
- На стройплощадке установлен роботизированный тахеометр с радиоканалом, при установке определивший свои координаты обратной засечкой по 2-3 реперам (точкам с известными плановыми координатами и высотной отметкой).
- Машина оборудована отражателем (с идентификатором) на телескопической мачте, закрепленной на отвале. UTS (тахеометр) следит за машинным отражателем (тем, на номер идентификатора которого настроен), измеряет два угла и дальность до него и 20 раз в секунду передает эти данные радио машины (только одной единственной) по каналу 2.4 ГГц. Далее положение отражателя блок управления машины пересчитывает в положение и направление движения режущей кромки отвала.
- Блок управления сравнивает эти данные с проектными (загруженными в блок управления в виде 3Д-поверхности) и выдает управляющие импульсы на гидравлику — автоматически устанавливает отвал на поверхность, параллельную проектной и отстоящую от нее на заданную оператором величину (срез в несколько проходов, например).
- Получаемая точность – не хуже +-0.5 см в плане и +-1 см по высоте.
-
Система берет на себя управление положением отвала машины — с высокой и недостижимой человеком точностью позиционирует отвал на заданной поверхности.
- Оператор может самостоятельно, не выходя из машины, контролировать качество работ.
- Проста в использовании, не требуется присутствие геодезиста на площадке (только с утра выставить и засечь тахеометр, если снимался на ночь), т.к. оператор может самостоятельно включить систему и начать работу. Снижает требования к квалификации оператора.


Устройство и принцип работы наземного лазерного сканера
Вопрос точности геодезических работ, полноты и объективности получаемой информации имеет принципиальное значение, так как он во многом определяет уровень качества и надежности строящихся и эксплуатируемых зданий и сооружений. При оценке надежности и точности измерений главным является выбор методики геодезических работ и соответствующих приборов исходя из технологических требований проекта и допусков.
С ростом научно-технического прогресса и технического развития строительства совершенствовались также методы и приборы для проведения инженерно-геодезических работ. Современный геодезический прибор — это продукт высоких технологий, который объединил в себе последние достижения электроники, точной механики, оптики, материаловедения и других наук.
Современный геодезический прибор — это продукт высоких технологий, который объединил в себе последние достижения электроники, точной механики, оптики, материаловедения и других наук.
Относительно недавно производители геодезического оборудования стали выпускать лазерные электронные тахеометры без отражателя. Эти геодезические приборы сделали работу геодезиста эффективнее и проще, а главное — позволили быстрее решать ряд задач, с которыми геодезисты сталкиваются почти каждый день. Безусловно, такие приборы практически идеальны для проведения архитектурных обмеров. Использование безотражательных тахеометров по сравнению с измерительными системами, которые использовались ранее, увеличило производительность труда приблизительно в три раза.
Но мир традиционных геодезических и связанных с ними других координатных измерений все же консервативен. И он не обеспечил точными и полными данными возросшие потребности в построении цифровых моделей объектов, зданий и сооружений. Действительно, дискретность и разреженность пунктов с определяемыми координатами не позволяют с максимальной точностью описать объекты съемки — количество информации недостаточно.
Появление метода трехмерного лазерного сканирования полностью изменило мировоззрение: появилась возможность получать изображения, модели объектов, сооружений, целых застроенных территорий с максимальной полнотой и детальностью. Наземное лазерное сканирование стало одним из направлений научных исследований для съемок и документирования культурного наследия и широко используется для охраны и реставрации архитектурных памятников. Это относительно новая составная часть интегрированной технологи с документированием, которая позволяет быстро и точно строить трехмерные пространственные модели сложных архитектурных объектов.
Развитию трехмерного моделирования на данном этапе уделяют значительное внимание. Постоянно совершенствуются приборы сбора 3D-данных, программное обеспечение для обработки этих данных, построения трехмерных моделей.
- при построении трехмерных моделей застроенных территорий и создании «3D-кадастра» городов;
- при создании цифровых моделей местности и цифровых моделей рельефа;
- при съемке и проектировании промышленных объектов и элементов инфраструктуры;
- в горной промышленности;
- в строительстве и реконструкции объектов;
- в архитектуре, археологии, а также для сохранения архитектурного наследия.

Надо отметить, что области применения трехмерного лазерного сканирования очень широки. Этот метод находит применение в компьютерной графике, машиностроении, конструировании и даже в медицине (ортопедии, протезировании, пластической хирургии, косметологии, стоматологии).
Лазерное сканирование — это метод, который позволяет создавать цифровую модель всего окружающего пространства, представляя его как массив точек с пространственными координатами. Основные отличия от съемки с помощью традиционных геодезических приборов, например тахеометров, большой уровень автоматизации работ, наличие сервопривода, автоматически поворачивающего измерительную головку в двух (вертикальной и горизонтальной) плоскостях, а самое главное — большая скорость и «плотность» измерений.
Полученная после измерений модель объекта — это гигантский набор точек (от сотни тысяч до нескольких миллионов), характеризуемых координатами, которые измерены с точностью до нескольких миллиметров. Не нужно больше смотреть в окуляр тахеометра, выискивая цель, не нужно нажимать кнопки для запуска дальномера и записи полученных данных в память, и, наконец, нет необходимости по нескольку раз переставлять прибор для поиска наиболее выгодной для съемки позиции.
Преимущества сканирования над тахеометрической и другими наземными видами съемки:
- мгновенная трехмерная визуализация;
- высокая точность;
- несравнимо полные результаты;
- быстрый сбор данных;
- обеспечение безопасности при съемке труднодоступных и опасных объектов.
Материальные затраты по сбору данных и моделированию объекта методами трехмерного лазерного сканирования на небольших участках и объектах сопоставимы с традиционными методами съемки, а на участках большой площади или протяжности — ниже. При расчете затрат на съемку надо учитывать, что полнота и точность результатов лазерного сканирования позволяют избежать дополнительных расходов на этапах проектирования, строительства и эксплуатации объекта.
Преимущество сканирования над фотограмметрическими способами съемки
Лазерное сканирование и моделирование аналогично наземным фотограмметрическим методам, но позволяет получать координаты с одной точки стояния и без последующей сложной камеральной обработки, при этом еще и с возможностью контролировать измерения непосредственно в полевых условиях. Кроме этого, обеспечивается более высокая точность измерений в сравнении с фотограмметрическими методами при одинаковом отдалении от снимаемого объекта.
Кроме этого, обеспечивается более высокая точность измерений в сравнении с фотограмметрическими методами при одинаковом отдалении от снимаемого объекта.
Преимущества лазерного сканирования:
- возможность настройки некоторых моделей сканеров на фиксацию первого и/или последнего отражения, что позволяет отличать отраженный сигнал от растительности и поверхности земли — «пробивать » растительность;
- более простой способ привязки к системе координат.
Финансовые и временные затраты свидетельствуют в пользу лазерного сканирования. При отсутствии необходимости векторизации трехмерного растра работа с результатами лазерного сканирования может происходить в режиме реального времени, что для фотограмметрических способов невозможно.
Недостатки лазерного сканирования:
- с большинством сканеров рекомендуется работать при температуре не ниже 0°С, что устанавливает некоторые ограничения на полевые работы в зимнее время, хотя некоторые модели отлично работают и при -20°С;
- до сегодняшнего дня ни одна из систем лазерного сканирования не имеет функций тахеометра по непосредственной привязке отдельных сканов к единой системе координат, поскольку сканирование с каждой точки стояния проводится в системе координат прибора; поэтому необходим дополнительный геодезический прибор для определения координат контрольных точек (марок) сканера;
- на данный момент достаточно низкая степень автоматизации при трехмерном моделировании сложных объектов на основе лазерного сканирования в компьютере; большинство программных продуктов сфокусировано на индустриальных приложениях — в них принято, что большинство объектов могут описываться простыми геометрическими примитивами, что неприменимо при компьютерном моделировании памятников архитектуры.

В последнее время все боле популярными становятся некоммерческие проекты, цель которых — создание и публикация в интернете трехмерных моделей объектов культурного наследия. Сканирование — это прекрасный метод, который позволяет автоматизировать многие виды геодезических работ, заменив трудоемкие и подчас даже опасные измерения простым нажатием кнопки. Конечно же, при съемке сложных объектов необходимо также планировать работы, выбирать несколько точек для сканирования. Создание трехмерных моделей объектов, в том числе и памятников архитектуры, требует выполнения нескольких сканов с нескольких точек, расположенных как внутри, так и вне сооружения. Необходимо также совершенствовать программное обеспечение. Но, несмотря на эти обстоятельства сканирование — это более быстрый, а главное — в сотни раз более информативный метод получения данных об окружающем мире.
Инструкция для тахеометров Sokkia SET 250RX/350RX/550RX/650RX
Инструкция для тахеометров Sokkia SET 250RX/350RX/550RX/650RX
Руководство по эксплуатации тахеометров Sokkia SET 250RX/350RX/550RX/650RX.
| Имя файла: | sokkia_set_250rx_350rx_550rx_650rx.pdf |
| Размер файла: | 12.73 MB |
| Тип файла: | application/pdf |
| Посещений: | 10391 Посещений |
| Дата последнего обновления: | 24-12-15 |
В профессиональной среде геодезистов хорошо известна высокоточная измерительная техника японской компании Sokkia. К каждой модели прикладывается техническая документация, в том числе и руководство по эксплуатации. Но что делать, если инструкция для тахеометра Sokkia отсутствует? Раньше это было серьёзной проблемой. Теперь есть хорошая новость: в любой момент доступен документ от производителя с подробным описанием прибора.
Но что делать, если инструкция для тахеометра Sokkia отсутствует? Раньше это было серьёзной проблемой. Теперь есть хорошая новость: в любой момент доступен документ от производителя с подробным описанием прибора.
Для эффективной работы нужно не просто приобрести качественное оборудование, но и пройти инструктаж по работе с ним. Самый лёгкий способ – бесплатная инструкция к тахеометру Sokkia в электронной версии для скачивания. Из документа вы узнаете о возможностях модели, которая вас интересует. Общие принципы работы и комплектация тахеометров во многом схожи, но в каждом модельном ряду даже у одного производителя есть существенные различия. Особенно это касается пользовательского интерфейса и возможностей операционной системы. У производителя Sokkia не редкость модели с удобным управлением с помощью «горячих» клавиш и с обширной внутренней памятью.
Инструкция по эксплуатации тахеометра Sokkia – гарантия точных измерительных работ на местности и в помещениях. Знакомство с информацией о последовательности установки, настройки прибора и выполнении разных видов измерений существенно повышает производительность оператора. Разделы о технике безопасности при работе и правилах эксплуатации оборудования необходимы для предотвращения травматизма и обеспечения длительного срока службы прибора без поломок.
Знакомство с информацией о последовательности установки, настройки прибора и выполнении разных видов измерений существенно повышает производительность оператора. Разделы о технике безопасности при работе и правилах эксплуатации оборудования необходимы для предотвращения травматизма и обеспечения длительного срока службы прибора без поломок.
Помните, что модели разных производителей отличаются, и скачивайте нужные инструкции в соответствующих разделах сайта. Например, руководство пользователя для тахеометра Leica вы найдёте здесь. Бесплатный доступ ко всем инструкциям позволяет скачивать любое количество документов без финансовых трат. Теперь вам не нужно пытаться приспособить одну инструкцию для всех моделей. Выбирайте руководство по названию производителя, серии и номеру тахеометра для эффективной работы прибора.
Тахеометр: основной принцип
ИТОГО СТАНЦИЯ: ОСНОВНОЙ ПРИНЦИП
Хотя ленты и теодолиты используются регулярно на объекте — всего
станции также широко используются в геодезии, строительстве и строительстве.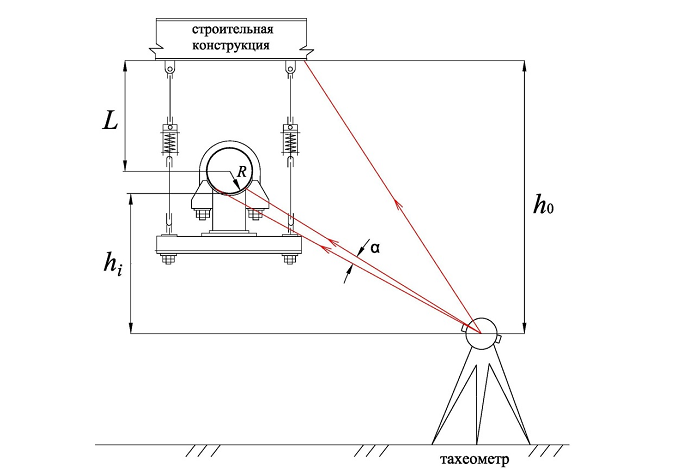 конструкции, потому что они могут измерять как расстояния, так и углы.
конструкции, потому что они могут измерять как расстояния, так и углы.
Типичный тахеометр показан на рисунке. ниже
Рис 3.1 Тахеометр
Поскольку инструмент сочетает в себе угол и измерение расстояния в той же единице, оно известно как интегрированная сумма станция, которая может измерять горизонтальные и вертикальные углы, а также уклон расстояния.
Используя вертикальный угол, тахеометр может рассчитать компоненты горизонтального и вертикального расстояния измеренное наклонное расстояние.
Помимо основных функций, всего станции могут выполнять ряд различных исследовательских задач и связанных вычислений и может хранить большие объемы данных.
Как с электронным теодолита, все функции тахеометра контролируются его микропроцессор, доступ к которому осуществляется через клавиатуру и дисплей.
Для использования тахеометра необходимо
установлен над одним концом измеряемой линии, а какой-то отражатель расположен на
другой конец так, чтобы прямая видимость между инструментом и
отражатель ничем не закрыт (как показано на рисунке ниже).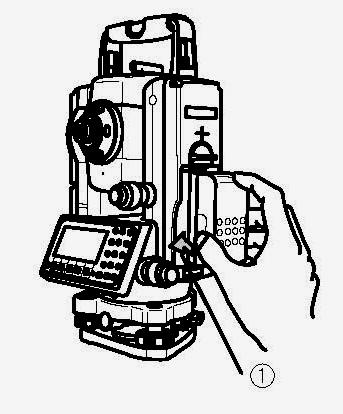
— Отражатель представляет собой призму, прикрепленную к опоре детали
— Телескоп выровнен и направлен на призму
-Последовательность измерения инициируется и сигнал отправляется на рефлектор, и часть этого сигнала вернулся в тахеометр
-Этот сигнал затем анализируется на рассчитайте наклонное расстояние вместе с горизонтальным и вертикальным углами.
-Также может быть использовано общее количество станций без отражателей, и телескоп направлен в точку, которую необходимо измерено
-Некоторые инструменты моторизованы. драйверов и может использовать автоматическое распознавание цели для поиска и захвата призма — это полностью автоматизированный процесс и не требует оператора.
-Некоторыми тахеометрами можно управлять с
подробный столб, позволяющий проводить опросы одним человеком.
Рис 3.2 Измерения с помощью тахеометра
Большинство тахеометров имеют диапазон измерения расстояний до нескольких километров при использовании призмы и дальность действия не менее 100 м в режиме без отражателя и точность 2-3 мм в коротком диапазоны, которые уменьшатся примерно до 4-5 мм на 1 км.
Хотя углы и расстояния могут измерять и использовать отдельно, наиболее распространенные приложения для общего станции возникают, когда они объединяются для определения положения в контрольных съемках.
Как и тахеометр, Геодезическая съемка все чаще проводится с использованием оборудования GPS. Некоторые были сделаны прогнозы, что эта тенденция сохранится, и в долгосрочной перспективе Методы GPS могут заменить другие методы.
Хотя использование GPS
увеличивается, тахеометры являются одним из основных инструментов, используемых на стройплощадке. для осмотра и будет какое-то время.
для осмотра и будет какое-то время.
Разработки в обеих технологиях найдут точка, где могут быть изготовлены устройства, дополняющие оба метода.
Тахеометр при съемке | Части тахеометра | Работа тахеометра | Использование тахеометра
1. ВведениеТахеометр для геодезической съемки — это инструмент, который в первую очередь разработан как комбинация электронного транзитного теодолита, электронного дальномера (EDM) и программного обеспечения, работающего на внешнем компьютере, называемом сборщиком данных.
Геодезист может использовать тахеометр для различных целей, таких как определение углов, измерение расстояний и т. Д.
Тахеометршироко используется в современной геодезии, археологии, горном деле, реконструкции частных аварий и т. Д.
С помощью триангуляции и тригонометрических вычислений измеренные углы и расстояния могут использоваться для определения фактического положения требуемых точек или даже положения тахеометра по известным точкам в абсолютном выражении.
2. Тахеометр в геодезии — обзорБольшинство современных тахеометров имеют интерфейс GPS, сочетающий в себе две вышеупомянутые технологии.
Дизайн интерфейса выполнен таким образом, что обеспечивается использование преимущества обеих технологий (т.е. в GPS; прямая видимость не требуется между последовательными точками измерения.
В то время как в традиционном тахеометре; требуется высокая точность измерения, особенно по вертикальной оси по сравнению с GPS).
Тахеометр — это геодезический инструмент, который измеряет углы, используя электрооптическое сканирование чрезвычайно точных цифровых штрих-кодов, которые выгравированы на вращающихся стеклянных цилиндрах или дисках, имеющихся внутри инструмента.
Высококачественный тахеометр способен измерять даже углы до 0,5 угловой секунды, тогда как недорогие тахеометры в основном могут измерять углы до 5 или 10 угловых секунд.
В тахеометре измерение расстояния выполняется с использованием модулированного микроволнового или инфракрасного несущего сигнала, который генерируется небольшим твердотельным излучателем на оптическом пути инструмента, который отражается обратно к измеряемому объекту.Затем бортовой компьютер тахеометра считывает и интерпретирует возвращаемый сигнал. Затем расстояние должным образом определяется путем приема и передачи нескольких частот.
Большинство тахеометров состоят из специально изготовленной стеклянной призмы Porro Prism , которая служит отражателем для сигнала EDM и способна измерять расстояние до нескольких километров.
EDM типичного тахеометра способен измерять расстояние с точностью до 3 миллиметров или 1/100 фута.
В настоящее время также используются роботизированные тахеометры. Такой тип тахеометра позволяет оператору управлять инструментом на расстоянии с помощью пульта дистанционного управления. Это помогает избежать необходимости для помощника сотрудника держать призму отражателя над точкой измерения. Это позволяет оператору держать отражатель самостоятельно и управлять тахеометром из наблюдаемой точки.
3. Принцип работы тахеометра при съемкеОсновной принцип тахеометра заключается в том, что расстояние между любыми двумя точками может быть известно, если известны скорость и время, необходимое свету для прохождения.
Расстояние = Скорость * Время
Следующее соотношение уже запрограммировано в памяти тахеометра вместе с поправочными коэффициентами, которые используются для расчета необходимого горизонтального расстояния и, наконец, отображаются на ЖК-экране инструмента.
4. Цели использования тахеометра при съемкеОсновные цели использования тахеометра для съемки можно перечислить следующим образом:
а.Для определения углов между точками или среднего значения нескольких измеренных углов.
г. Для определения горизонтального расстояния между точками или среднего значения нескольких измеренных расстояний.
г. Для определения высоты различных точек.
г. Для определения трех координат местоположения различных точек.
5. Характеристики современного тахеометраВот некоторые из новых функций, которые демонстрирует современный тахеометр:
а.Он способен исследовать темные и влажные поверхности даже на больших расстояниях.
г. Он может вести съемку с полюсов без использования радиоприемников.
г. Он способен измерять узкие объекты, а также узкие углы.
г. Он может предоставить удаленные местоположения в случае потери или кражи какой-либо точки или устройства.
e. Программное обеспечение, встроенное в современный тахеометр, работает мгновенно и может предоставлять обновления прошивки непосредственно в полевых условиях.
6.Операции, выполняемые тахеометром при съемкеВажные операции, которые можно выполнять с помощью тахеометра, можно перечислить следующим образом:
а. Измерение расстоянияВажным компонентом тахеометра является электронное измерение расстояния (EDM), которое отвечает за измерение расстояния.
Диапазон измерения EDM может варьироваться от 2,8 км до 4,2 км.
Стандартный EDM способен измерять расстояние с точностью от 5 мм до 10 мм на км измерения.
EDM оснащен автоматическим распознавателем целей. Расстояние, измеренное тахеометром, всегда представляет собой наклонное расстояние от инструментальной станции до объекта.
г. Измерение углаДругой важной операцией, выполняемой тахеометром, является измерение угла.
Обычно любое подходящее направление следует принимать в качестве опорного направления для измерения горизонтальных углов.
В то время как в случае вертикальных углов направление вертикально вверх i.е. зенит принимается за опорное направление.
г. Обработка данныхОбработка данных в тахеометре осуществляется с помощью встроенного в него микропроцессора.
Встроенный микропроцессор способен усреднять несколько выполненных наблюдений. Микропроцессор может вычислять горизонтальное расстояние, а также координаты местоположения (X, Y, Z).
В современном тахеометре микропроцессор может применять даже поправки на давление и поправки на температуру, если указаны значения температуры и давления.
г. Отображение выводаВыходные или вычисленные результаты отображаются в тахеометре с использованием электронного дисплея.
Блок дисплея может отображать вычисленное расстояние по горизонтали, расстояние по вертикали, горизонтальный и вертикальный углы, разницу высот между точками и координаты местоположения требуемых точек.
эл. Электронный учет (Электронная книга)Тахеометр может хранить данные в электронной книге, которая похожа на компакт-диск компьютера.
Такая электронная книга может хранить данные от 2000 до 4000 точек.
Данные, хранящиеся в электронной книге тахеометра, могут быть выгружены геодезистом в компьютер.
7. Компоненты тахеометра при съемкеЭлектронный тахеометр состоит из EDM, теодолита и встроенного микропроцессора.
Для хранения данных также предусмотрена карта памяти.
Он состоит из батареи, которая находится в гнезде для батареи.
Типичный тахеометр состоит из следующих компонентов:
1. Рукоятка
2. Винт с ручкой
3. Терминал ввода / вывода данных
4. Отметка высоты инструмента
5. Крышка аккумуляторного отсека
6. Панель управления
7. Зажим трегера / Зажим переключения
8. Опорная плита
9. Винт установочной лапки
10. Винты регулировки круглого уровня
11. Круговой уровень
12.Дисплей
13. Линза объектива
14. Прорезь для трубчатого компаса
15. Кольцо фокусировки оптического центрира
16. Крышка визирной сетки оптического центрира
17. Окуляр оптического центрира
18. Зажим горизонтальный
19. Винт точного перемещения по горизонтали
20. Разъем ввода / вывода данных
21. Разъем внешнего источника питания
22. Тарелка уровня
23. Винт регулировки уровня пластины
24. Зажим вертикальный
25.Вертикальный винт точного движения
26. Окуляр телескопа
27. Кольцо фокусировки телескопа
28. Подглядывание
29. Инструмент центра метки
8. Принадлежности тахеометра для съемкиПомимо основных компонентов, тахеометр также требует некоторых дополнительных принадлежностей.
К таким аксессуарам относятся клавиатура, панель управления, сборщики данных, отражатели, блоки памяти и т. Д., Которые кратко описаны ниже.
а. КлавиатураКлавиатура является важным аксессуаром, необходимым для подачи команд на микропроцессор, встроенный в тахеометр, поскольку он содержит различные клавиши.
К таким клавишам относятся командные клавиши, клавиши переключения, клавиши подсветки, клавиши питания и т. Д.
Различные типы клавиш, встроенные в клавиатуру, с указанием их функций перечислены ниже:
Кнопка включения: Для включения или выключения тахеометра.
Звездочка: Для переключения из одного режима в другой и для изменения настроек тахеометра.
Клавиша осветителя: Для включения / выключения лазерной указки и светового указателя, для освещения сетки нитей, а также для выбора яркости подсветки экрана.
Esc Клавиша: Для возврата к предыдущему экрану или отмены ввода данных.
Клавиша вкладки: Переход к другому элементу.
B.S Key: Для удаления элемента слева.
S.P Ключ: Для ввода пробела.
Клавиша FUNC: Для переключения между наблюдениями.
ENT Клавиша: Выберите или подтвердите любое введенное значение или наблюдение.
Клавиша Shift: Для переключения между строчными и прописными буквами.
Целевые ключи: Для переключения между различными целями.
PRG Клавиша: Для переключения между различными режимами программы.
г. Сборщик данныхКак следует из названия, сборщик данных собирает и хранит наблюдаемые данные или наблюдения.
Вся операция приема и сохранения данных контролируется сборщиком данных.
Сборщик данных хранит данные либо в двоичной форме, либо в ASCII.
Сборщики данных можно разделить на внешние и внутренние.
г. ПамятьЭлектронный тахеометр оснащен встроенными картами памяти для обработки и хранения данных или наблюдений.
Карта памяти, используемая в тахеометрах, в целом соответствует стандартам PMCIA.
Карта памяти может иметь емкость от 5000 до 10 000 кодированных точек.
Данные, хранящиеся на карте памяти, могут быть выгружены на любое вычислительное устройство.
г. ОтражательОтражатель — один из самых важных аксессуаров тахеометра.Это связано с тем, что тахеометр работает или выполняет измерения с использованием отраженных лучей.
Отражатель представляет собой специально сконструированную отражающую призму, состоящую из кубов или блоков отражающих стекол.
эл. Программное обеспечениеВ большинстве тахеометров используется операционная система Windows CE.
9. Пригодность тахеометраЖелательно использовать тахеометр для съемки при наличии любого из следующих условий:
а.Когда были поставлены два балла.
г. Когда указана только одна из координат.
г. Когда координаты не заданы и необходимо использовать произвольные наборы координат.
10. Точность тахеометраТочность тахеометра зависит от типа используемого тахеометра. Это степень близости между измеренным значением и фактическим значением.
Обычно угловая точность тахеометра составляет от 1 до 20 дюймов.
Точность измерения расстояния в основном зависит от инструментальной погрешности и погрешности, связанной с длиной измерения.
Инструментальная погрешность может варьироваться от +/- 10 мм до +/- 2 мм.
Погрешность из-за длины измерения может варьироваться от +/- 10 мм до +/- 2 мм на километр в случае 1 призмы, от 2,5 до 2,7 км в случае двух призм и от 5 до 7 км в случае 3 призм.
11. Наименьшее количество тахеометровВ тахеометре; наименьшее количество углов составляет 1 дюйм (1 секунда), а наименьшее количество расстояний — 1 мм.
12. Временная наладка тахеометраПеред началом наблюдений необходимо временно настроить тахеометр на станции.
Временная юстировка тахеометра состоит из следующих этапов:
а. Создание:
Первым шагом временной настройки является настройка тахеометра.
Включает процесс фиксации теодолита на штативе.
г. Центровка:
Центрирование — это процесс перемещения вертикальной оси теодолита точно над отметкой станции с помощью центрирующей пластины. Центрирующая пластина также известна как трегер.
г. Прокачка:
Это процесс выравнивания основания инструмента, чтобы сделать вертикальную ось действительно вертикальной, обычно с помощью встроенного пузырькового уровня.
Выравнивание выполняется с помощью планок и регулировочных винтов.
Во-первых, пузырек выравнивается параллельно двухфутовым винтам и доводится до центра, поворачивая оба винта в одном направлении.
Затем пузырек выравнивается параллельно оставшемуся опорному винту и перемещается в центр, вращая винт.
Процедура повторяется до тех пор, пока пузырек не останется в центре во всех направлениях.
г. Фокусировка:
Фокусировка включает устранение ошибки параллакса путем правильной фокусировки объектива и окуляра.
Фокусировка выполняется для устранения параллакса, поскольку это может затруднить точное наведение и разделение объекта пополам.
Для фокусировки сначала держите перед объективом белую бумагу или направляйте телескоп в небо. Затем окуляр продвигается и выдвигается до тех пор, пока перекрестие не станет отчетливо видно. Это можно проверить, медленно отведя глаз в сторону.
После устранения параллакса перекрестие и изображение останутся неподвижными.
13.Полевая процедура съемки с использованием тахеометраПолевая процедура съемки тахеометром включает в себя следующие серии шагов:
а. Установка штатива:
Ножки штатива отрегулированы таким образом, чтобы они были расположены на одинаковом расстоянии.
Головка штатива также должна быть выровнена.
Регулировку необходимо производить так, чтобы головка штатива находилась точно над отметкой станции.
г.Установка тахеометра на штатив:
После настройки тахеометра его устанавливают на штатив.
Одной рукой инструмент закреплен на штативе, а другой рукой должен быть закреплен центрирующий винт.
г. Сосредоточение внимания на точке обзора:
Затем фокусировка на точку съемки выполняется с помощью оптического центрира.
г. Выравнивание тахеометра:
Затем регулируют регулировочные винты на ножке таким образом, чтобы точка съемки находилась по центру сетки нитей оптического центрира.
Ножки штатива дополнительно отрегулированы так, чтобы пузырек располагался по центру круглого уровня.
Во-первых, пузырек выравнивается параллельно двухфутовым винтам и доводится до центра, поворачивая оба винта в одном направлении.
Затем пузырек выравнивается параллельно оставшемуся опорному винту и перемещается в центр, вращая винт.
Процедура повторяется до тех пор, пока пузырек не останется в центре во всех направлениях.
эл.Электронная проверка уровня:
Сначала прибор включается нажатием и удержанием кнопки «ON».
При включении прибора раздается звуковой сигнал.
После отображения начального экрана функция выбирается.
Винты уровня ножки регулируются таким образом, чтобы электронный пузырек также находился по центру.
Инструмент поворачивают на 90 градусов, и процесс повторяется.
ф.Регулировка изображения и фокусировка сетки (перекрестие):
Горизонтальный и вертикальный зажимы отпускаются, и телескоп направляется на любой светлый фон, который не имеет характерных черт.
Затем сетка или перекрестие регулируется до тех пор, пока изображение сетки не станет четко сфокусированным.
Затем телескоп фокусируется на цели, и кольцо фокусировки регулируется до тех пор, пока цель не будет четко сфокусирована.
Затем проверяют устранение параллакса, медленно отводя голову в сторону.
г. Снятие мерок:
После выполнения вышеуказанных шагов тахеометр можно использовать для измерений или наблюдений.
14. Использование тахеометра в геодезииа. Измерение расстояния:
Одно из наиболее важных применений тахеометра — измерение расстояния.
Может использоваться для измерения расстояния с использованием модулированного инфракрасного сигнала несущей.Этот сигнал может вычислить расстояние после того, как он отражен или отражен от рассматриваемого объекта.
Такой инфракрасный несущий сигнал генерируется тахеометром, использующим твердотельный излучатель, а интерпретация отраженного сигнала выполняется с помощью вычислительного чипа, встроенного в сам тахеометр.
г. Измерение угла:
Еще одно важное применение тахеометра — измерение углов между точками.
Такие угловые определения выполняются с помощью электрической и оптической системы сканирования телескопа. Эта система снабжена вращающимся стеклом, на котором нанесены штрих-коды. Такое стекло облегчает считывание углов.
В случае цифровых тахеометров, показания непосредственно записываются и сохраняются в основной памяти тахеометра. Сохраненные данные также можно передать на компьютер.
г. Определение координат:
Существенное применение тахеометра — определение местоположения требуемых точек i.е. его можно использовать для вычисления координат X, Y, Z точек съемки.
г. Геодезические и планировочные работы:
Геодезию можно легко выполнить с помощью тахеометра.
При топографической съемке тахеометр может использоваться для измерения расстояний, углов, а также координат местоположения, которые в дальнейшем могут быть использованы для подготовки топографических карт и планов.
Электронные тахеометры также можно использовать для разграничения границ участка и границ.
Может также использоваться для определения трассы каналов, туннелей, дорог, мостов и т. Д.
эл. Горное дело:
Перед началом любых горных работ должно быть выполнено горное обследование. Тахеометр — важный инструмент, используемый для этой цели. Его также можно использовать для определения точек добычи и подготовки карт добычи.
Такие точки и карты могут использоваться шахтерами для определения точек с обильными полезными ископаемыми.
Тахеометр также используется для определения местоположения и выравнивания горных туннелей.
ф. Гражданское строительство Строительные работы:
Практически все виды гражданского строительства и связанные с ними работы могут быть выполнены с использованием тахеометра.
Тахеометр может использоваться для измерения таких параметров конструкции, как расстояния, углы, отметки точек, координаты и т. Д.
Может использоваться для составления карт и планов, разграничения границ владений, топографической съемки, определения трассы дорог, мостов, туннелей и т. Д.
г. Автоматическое наведение цели:
Большинство современных тахеометров снабжено автоматическими системами наведения для повышения степени эффективности тахеометра.
Такая система предназначена для обеспечения лучшего и быстрого наведения на цель и определения местоположения любой точки на поверхности земли.
Система настолько быстра, что весь процесс измерения, обработки и вычисления расстояния, углов и координат происходит очень быстро за секунды.
Таким образом, вся работа может быть выполнена легко и быстро.
ч. Электрические и механические конструкции:
Схемы электрических и механических конструкций могут быть легко определены с помощью тахеометра.
С помощью тахеометра можно выполнять различные работы, такие как прокладка подземных трубопроводов, прокладка инженерных сетей, кабелей и т. Д.
15. Меры предосторожности при использовании тахеометраМеры предосторожности, которые необходимо соблюдать при использовании тахеометра, могут быть перечислены ниже:
а.С тахеометром необходимо обращаться правильно и держать обеими руками.
г. По возможности штатив следует удерживать на устойчивой поверхности.
г. Аккумулятор следует хранить с разряженным аккумулятором.
г. Зажимные винты нельзя сильно затягивать.
e. Штатив с установленным на нем тахеометром нельзя переносить с одной станции на другую.
ф. Будьте осторожны, когда трегер снят с тахеометра.
16. Преимущества тахеометраТахеометр имеет следующие основные преимущества:
а. Тахеометр помогает быстро завершить полевые работы за меньшее время.
г. Настройка тахеометра также проще, поскольку это можно легко сделать с помощью лазерного центрира.
г. Точность тахеометра относительно выше, чем у других геодезических инструментов.
г. Вычисленные значения могут быть непосредственно сохранены в тахеометре, а также могут быть легко переданы на вычислительное устройство.
e. Тахеометр также удобен для компьютеризации старых карт.
ф. Поскольку все наблюдения и вычисления выполняются в цифровом виде, ошибки из-за пропуска данных, неправильного чтения или записи наблюдений и т. Д. Не учитываются.
г. Это также может помочь в построении контуров и подготовке карты.
ч. Если указаны атмосферное давление и температура, поправки на давление и температуру также могут применяться напрямую.
и. Все изыскательские и офисные работы выполняются легко.
17. Недостатки тахеометраНекоторые недостатки тахеометра можно перечислить следующим образом:
а. При использовании тахеометра геодезисту может быть сложно перепроверить работу.
г. Для работы с прибором требуется квалифицированный персонал или опытный персонал.
c. Электронный тахеометр стоит дороже, чем другое обычное геодезическое оборудование.
г. В тахеометр встроено несколько электронных аксессуаров и деталей, которые могут подвергаться воздействию влаги.
18. Дистанционно управляемый тахеометр (роботизированный тахеометр)Дистанционно управляемые тахеометры — это современный тип тахеометров, спроектированный таким образом, что геодезист может управлять ими с определенного расстояния с помощью пульта дистанционного управления.
Роботизированный тахеометр способен автоматически определять местоположение цели. Он предлагает самую высокую степень точности и аккуратности среди всех типов геодезических инструментов.
Использование технологии дистанционного управления устраняет необходимость в помощнике для удержания рефлектора. Для проведения измерений достаточно только одного геодезиста на целевой станции.
Таким образом, роботизированные тахеометры сокращают количество персонала, необходимого для проведения измерений. Это также увеличивает скорость работы.
Некоторые из основных особенностей тахеометра с дистанционным управлением можно перечислить следующим образом:
а. Роботизированные тахеометры имеют беспроблемную конструкцию без кабеля, с которой легко обращаться.
г. Такие тахеометры имеют встроенную технологию отслеживания с быстрой блокировкой.
г. Отражательная система роботизированного тахеометра очень мощная и имеет самый большой радиус действия.
г. Этот тип тахеометра состоит из интерфейса полевого контроллера.
e. Роботизированный тахеометр легче по сравнению с обычными тахеометрами. Таким образом, такие тахеометры портативны и просты в обращении.
ф. Операционная система роботизированного тахеометра усовершенствована и предлагает улучшенную графику.По этой причине этот тахеометр также известен как мобильный инструмент с графическим интерфейсом Windows.
Принцип работы тахеометров гражданского назначения
Тахеометр— это наиболее популярный современный геодезический инструмент в гражданской промышленности. Следовательно, предпочтение отдается инженерам-строителям, знакомым с использованием тахеометров. Однако в действующих схемах инженерного образования тахеометр отсутствует.Поэтому эксперты в данной отрасли предлагают пройти производственное обучение использованию геодезического оборудования тахеометров. Это положительно улучшило бы возможности трудоустройства студентов-строителей в Индии.
Подробнее ..
Геодезия широко используется в различных инженерных областях, что особенно важно для проектов гражданского строительства. Это помогает в разработке трехмерного земного плана или карты определенного участка местности. Углы и расстояния до соответствующих топографических точек измеряются с помощью геодезического оборудования.
Различными категориями съемок являются геодезические съемки, кадастровые съемки, топографические съемки, геодезические съемки и аэрофотосъемка с использованием фотограмметрии, LiDAR.
Основными методами, используемыми для съемки, являются триангуляция, трилатерация, пересечение, нивелирование и радиация.
Последние проекты в области гражданского строительства
Хотите развить практические навыки в области гражданского строительства? Ознакомьтесь с нашими последними проектами и начните обучение бесплатно
Электронный тахеометр — это, по сути, теодолит или инструмент для измерения углов в горизонтальной и вертикальной плоскостях.Он дополнительно оснащен EDM для оценки относительных расстояний до земли. Тахеометр — это система реального времени, встроенная в бортовой компьютер для обратной связи в реальном времени. Используя измерения в реальном времени, бортовой компьютер может определять или корректировать данные и устанавливать точки построения. Некоторые тахеометры также являются роботизированными, что позволяет геодезисту использовать устройство удаленно с помощью контроллера.
Тахеометрыиспользуют вычислительные методы для обработки и анализа данных съемки.Эти вычисления выполняются внешним устройством, называемым сборщиком данных или регистратором данных. Устройство хранит записи всех проанализированных данных. Некоторые тахеометры также оснащены глобальной навигационной спутниковой системой для измерения координат точек съемки.
Тахеометрытакже интегрированы с технологией глобальной системы позиционирования (GPS) и географической информационной системой (GIS), которая облегчает точное картирование точек съемки. Данные, собранные с тахеометров, также используются для информационного моделирования зданий (BIM), т.е.е. графическое представление характеристик конструкции. Для этой цели широко используется компьютерное проектирование (САПР). Картографические данные, собранные с помощью тахеометров, также можно проецировать на Google Планета Земля.
Помимо геодезических работ в гражданском строительстве, тахеометры находят применение в археологии, исследовании места преступления, геодезических работах, необходимых для добычи полезных ископаемых, и во многих других возможных областях. Таким образом, рабочее знание тахеометров будет дополнительным преимуществом для набора навыков студентов инженерных специальностей.
Знаете ли вы
Skyfi Labs помогает студентам приобретать практические навыки, создавая реальные проекты.
Вы можете записаться с друзьями и получить наборы на пороге
Вы можете учиться у экспертов, создавать рабочие проекты, демонстрировать свои навыки всему миру и получать лучшие рабочие места.
Начни сегодня!
Civil Simplified, подразделение Skyfi Labs, выступило с инициативой проведения Survey Camp с использованием тахеометра.Это поможет сократить разрыв между образованием и отраслевыми стандартами для нынешнего поколения студентов инженерных специальностей. Нажмите здесь, чтобы получить дополнительную информацию.
Подробнее о курсе читайте здесь.Рабочие знания тахеометра — необходимый навык для студентов-строителей
Skyfi Labs • Опубликовано: 2014-05-22 • Последнее обновление: 2021-04-02Основные принципы съемки
Национальная сетка, показанная ниже, позволяет фиксировать любое положение в Великобритании.Это делается с помощью глобальных линий, называемых долготой и широтой. Долгота проходит от северного полюса к южному полюсу, в то время как широта проходит по окружности Земли к северу или югу от экватора. Гринвичская обсерватория в Лондоне находится на 0º долготы с линиями, идущими либо на запад, либо на восток, а экватор установлен на 0º с линиями, идущими либо на север, либо на юг.
Наша отправная точка для национальной сети в Великобритании находится в 2º к западу от Гринвича, который является центральным меридианом Великобритании, и 49º к северу от экватора.Точка пересечения этих двух линий известна как Истинное происхождение. Однако для эффективного использования сетки нижний юго-западный угол должен располагаться к югу и западу от материковой части Британии. По этой причине истинное начало смещается на 100 км к северу и на 400 км к западу, образуя точку, известную как ложное начало.
Национальная сеть теперь сформирована, как показано ниже, с каждым квадратом 100 км на 100 км
Рисунок 6
Вы заметите, что основные буквы основаны на ST JOHN и что многие из этих квадратов находятся в морских районах.Каждая основная буква покрывает 25 квадратов, а в случае T, O, H и J часть их сетки опускается. В случаях S и N у 25 квадратов есть вторая буква, которая начинается с A на северо-западе, использует все буквы алфавита, кроме I, и заканчивается на юго-востоке буквой Z. Итак, если мы посмотрим на Остров Человек большая часть юга острова находится в SC, но северная оконечность находится в NX. Эта двухбуквенная система координат идентифицирует область размером 100 км на 100 км.
Каждый квадрат теперь можно разделить на 100 квадратов (по десять в каждом направлении), теперь каждые 10 км на 10 км.Квадрат в этой сетке идентифицируется, начиная с юго-западного угла и сначала двигаясь на восток (это называется восточным положением), а затем, затем, двигаясь на север (это известно как северное положение)
Следовательно, мы можем переместиться на 60 км на восток и 40 км к северу, поэтому, если бы мы были в квадрате SP, это было бы SP 64. Затем SP64 можно было бы снова разделить на 100 квадратов, каждый теперь 1 км на 1 км, при этом нижний юго-западный угол будет 60 перемещаться на восток и 40 перемещаться на север, как показано ниже. Если мы переместимся на 7 км к востоку и 8 км к северу, то теперь привязка сетки будет SP 6748
Рисунок 7
Этот процесс может продолжаться до тех пор, пока мы не достигнем требуемого уровня точности.Подробную информацию о National Grid и Ordnance Survey можно найти на указанном ниже веб-сайте.
Если мы сможем определить точки координат рядом с нашим участком, используя карту Ordnance Survey, то мы сможем установить несколько контрольных точек вокруг объекта, которые относятся к Национальной сети. Как только эти контрольные точки установлены, мы можем найти любую точку, координаты которой известны из одной из наших контрольных точек, как показано ниже.
Рисунок 8
Чтобы найти точку разметки, нам нужно переместить 7.873 м на восток и 6,453 м на север
Таким образом, у нас образовался треугольник: —
Рисунок 9
Мы формируем треугольник таким образом, чтобы вычислить угол по часовой стрелке с севера, который известен как полный круг подшипник (WCB). Затем рассчитывается: —
Tan O 7,873 / 6,453 = 50 градусов 39 минут 38,5 секунд
Таким образом, расчеты в северо-восточном квартале дадут WCB 0 90, в то время как в юго-восточном квартале будет 90 180, SW будет будет 180 270, а четверть NW даст пеленг по всей окружности между 270 и 360.
% PDF-1.5 % 1616 0 obj> эндобдж xref 1616 83 0000000016 00000 н. 0000003115 00000 п. 0000003253 00000 н. 0000003653 00000 п. 0000002016 00000 н. 0000003698 00000 н. 0000003841 00000 н. 0000004190 00000 п. 0000004470 00000 н. 0000004617 00000 н. 0000004764 00000 н. 0000004911 00000 н. 0000005058 00000 н. 0000005205 00000 н. 0000005352 00000 п. 0000005499 00000 н. 0000005646 00000 н. 0000005793 00000 н. 0000005940 00000 н. 0000006086 00000 н. 0000006233 00000 н. 0000006380 00000 н. 0000006527 00000 н. 0000006673 00000 н. 0000006820 00000 н. 0000006967 00000 н. 0000007114 00000 н. 0000007261 00000 н. 0000007408 00000 п. 0000007555 00000 н. 0000007702 00000 н. 0000007849 00000 п. 0000007995 00000 н. 0000008142 00000 н. 0000008289 00000 н. 0000008435 00000 н. 0000008581 00000 п. 0000008726 00000 н. 0000008888 00000 н. 0000009450 00000 н. 0000009960 00000 н. 0000010189 00000 п. 0000010412 00000 п. 0000010653 00000 п. 0000010731 00000 п. 0000010777 00000 п. 0000011633 00000 п. 0000012214 00000 п. 0000012722 00000 п. 0000013289 00000 п. 0000013869 00000 п. 0000014399 00000 п. 0000014905 00000 п. 0000015388 00000 п. 0000015442 00000 п. 0000015496 00000 п. 0000015550 00000 п. 0000015604 00000 п. 0000015658 00000 п. 0000015712 00000 п. 0000015766 00000 п. 0000015820 00000 п. 0000015874 00000 п. 0000015928 00000 п. 0000015982 00000 п. 0000016036 00000 п. 0000016090 00000 н. 0000016144 00000 п. 0000016198 00000 п. 0000016252 00000 п. 0000016306 00000 п. 0000016360 00000 п. 0000016414 00000 п. 0000016468 00000 п. 0000016522 00000 п. 0000016576 00000 п. 0000016630 00000 п. 0000016684 00000 п. 0000016739 00000 п. 0000016794 00000 п. 0000016849 00000 п. 0000016904 00000 п. 0000002905 00000 н. трейлер ] >> startxref 0 %% EOF 1620 0 obj> поток aJ_}
Съемка с помощью тахеометра I Quinn Equipment
С развитием технологий строительная отрасль осталась далеко позади.Технологии сыграли важную роль в переосмыслении технологии на протяжении многих лет, и это принесло пользу как специалистам-практикам или строителям, так и их клиентам.
Своевременное использование строительных технологий, будь то новые версии или модернизация старых технологий, может значительно повлиять на качество ваших строительных работ. Одной из таких строительных технологий, которая за последние годы претерпела существенные усовершенствования, является тахеометр.
Прочтите, чтобы узнать больше о тахеометре, о съемке с помощью тахеометров и о том, почему вы хотите заполучить новейшие достижения этой технологии.
Что такое тахеометр?
Электронный тахеометр — это электронное геодезическое оборудование, используемое для измерения горизонтальных и вертикальных углов и расстояний при строительных, изыскательских и строительных работах.
В целом тахеометр представляет собой относительно сложную часть оборудования, состоящую из микропроцессора и блока памяти, отвечающего за обработку и хранение основных вычислений и показаний соответственно.
По данным Организации гражданского строительства, тахеометр в настоящее время является одним из наиболее часто используемых инструментов в области геодезии.
То, что сейчас известно как тахеометр, впервые было представлено под разными названиями, включая теодолит EDM, электронный тахометр. Хотя мнения о том, как этот сложный механизм стал называться тахеометром, разнятся, профессионалы отрасли единодушны в том, что это название подходит для его пользы.
Первые выпуски тахеометра были полностью механическими, с несколькими шестеренками и ручками, для работы которых требовалось более одного человека.В полуавтоматических тахеометрах, которыми мы пользуемся в настоящее время, для регулировки используются серводвигатели с электрическим приводом, что делает их относительно простым и удобным инструментом.
Компоненты тахеометра
Электронный тахеометр — это устройство, состоящее из нескольких аппаратных и программных компонентов, которые работают вместе для измерения углов и расстояний.
Что можно получить от тахеометра?
Измерение расстояния: Электронный блок измерения расстояния в тахеометре отвечает за измерение расстояния от одной точки до другой.В среднем тахеометр обеспечивает точность 5-10 мм на км с еще большей точностью в новых моделях. Диапазон измерения расстояний тахеометра составляет от 2 до 4 км, в зависимости от используемой модели.
Обработка данных: При проведении измерений на земной поверхности может действовать ряд факторов, таких как температура и атмосферное давление, влияющие на точность измерений. В блоке обработки данных тахеометра соответствующие поправки будут применяться в зависимости от условий, гарантируя, что получаемые вами измерения будут максимально точными.
Измерение угла: С помощью электронного теодолита тахеометр может удобно измерять как горизонтальные, так и вертикальные углы с диапазоном точности 2-6 секунд, в зависимости от используемой модели. При измерении вертикальных углов направление вверх используется в качестве ориентира, в то время как любое направление может использоваться при измерении горизонтальных углов.
Как начать съемку с помощью тахеометров?
При съемке с помощью тахеометров характеристики оборудования могут варьироваться от модели к модели, но общий принцип работы остается тем же.
В главном меню тахеометра вы получаете доступ ко всем функциям инструмента.
- Нажмите 2 на клавиатуре, чтобы войти в меню управления данными.
- В меню управления данными нажмите F1, чтобы управлять заданиями, а затем F3, чтобы создать новое задание.
- На экране нового задания введите желаемое имя задания на клавиатуре и затем нажмите Enter для подтверждения.
- После ввода имени нажмите F4, чтобы сохранить изменения и вернуться в главное меню.
- В главном меню нажмите 1, чтобы войти в меню приложений, затем нажмите F1, чтобы войти в меню опроса.
- В меню съемки нажмите F2, чтобы объявить точечную станцию и ориентацию.
- Введите ID точки и нажмите F3, чтобы ввести координаты.
- На экране координат введите декартовы координаты точки станции с клавиатуры и затем нажмите Enter для подтверждения, затем F4 для сохранения.
- Затем введите высоту тахеометра с клавиатуры.
- Нажмите F3, чтобы войти в меню ориентации, а затем нажмите F1, чтобы установить угол направления оси y.
- Установите тахеометр в правильное положение, а затем нажмите F3, чтобы установить нулевые углы. Затем нажмите F2, чтобы записать введенную информацию.
- Затем нажмите F4, чтобы начать опрос. После начала съемки вы можете выбрать ID точки и высотные цели, вставить комментарии и просмотреть результаты измерений.
- Нажмите F2, чтобы начать измерение, и F3, чтобы сохранить данные.Чтобы объединить процесс измерения и сохранения, нажмите F1. После сохранения первого измерения точка ID будет автоматически увеличена, чтобы прибор был готов к выполнению следующего измерения.
Чтобы изменить станцию, указать точку и записать новые измерения: Выключите инструмент и переместите его в новую точку станции.
- Оказавшись в новой точке станции, включите инструмент и откройте меню съемки.
- Нажмите F2, чтобы выбрать точечную станцию, затем введите идентификатор точечной станции на клавиатуре.Либо, если у вас есть предварительно сохраненные идентификаторы точечных станций, нажмите F1 для поиска.
- Введите новую высоту инструмента и нажмите F4 для подтверждения.
- Нажмите F3, чтобы выбрать ориентацию инструмента, а затем F2, чтобы выбрать точку ID для ориентации.
- Введите ориентацию задней точки или нажмите F1 для поиска среди сохраненных измерений.
- Введите точку измерения my F1 и, при желании, измерьте дополнительные точки для уточнения ориентации.
- Нажмите F4, чтобы продолжить съемку с новой точечной станции.
- Во время съемки вы можете изменить настройки EDM, нажав F4 для просмотра доступных опций и F3 для входа.
Какие типы обследований можно проводить с помощью тахеометров?
С помощью тахеометра вы можете выполнить несколько съемок, в том числе:
- Топографические съемки
- Гидрографические съемки
- Обычные строительные изыскания и проекты
- Кадастровые съемки
Безграничные тахеометры (тахеометры Leica, роботизированные тахеометры)
Тахеометры Leica — ведущий мировой производитель тахеометров, как аппаратного, так и программного обеспечения, и мы являемся проверенным дилером их тахеометров и другого строительного оборудования.
Электронные тахеометры с ручным управлением
При использовании ручного тахеометра полученные данные будут в любом формате, обеспечивая измерения средней и высокой точности.
Роботизированные тахеометры
В роботизированных тахеометрах большинство измерений и регулировок, необходимых для проведения измерений, корректируются автоматически с помощью серводвигателей с электрическим приводом. Эта автоматизация позволяет управлять тахеометром только одному человеку.
Другие продукты, которые могут вас заинтересовать
- Лазеры и устройства управления машинами
- Локаторы подземных коммуникаций
- Оптические инструменты
- Продукты GPS
- Штативы для лазерного уровня
- Ротационный лазерный уровень Стержни
Свяжитесь с нами, чтобы узнать лучшую цену на тахеометр
Чтобы узнать больше о тахеометрах и другом строительном оборудовании, свяжитесь с нами, чтобы получить доступные расценки на современное оборудование.
Все эти уровнемеры Вы можете найти на наших сайтах по самым выгодным ценам.
В зависимости от вида работы выберите подходящую именно вам.
Позвоните нам сегодня , чтобы узнать об уровне лучших оценщиков.
Анализ точности мониторинга деформации плотины и коррекции рефракции с помощью роботизированного тахеометра
Abstract
Роботизированные тахеометры широко используются для непрерывного автоматического мониторинга деформаций плотин.В этом отношении точность мониторинга является важным фактором, влияющим на анализ деформации. Сначала представлены методы расчета перемещений для мониторинга деформации плотины с помощью тахеометров и выведены соответствующие формулы среднеквадратичной ошибки. Затем для ошибок, вызванных атмосферной рефракцией, описаны два метода исправления. Моделирование проводилось для сравнения точности смещения, рассчитанной разными методами. Он показал, что разница между методом полярных координат и прямым пересечением меньше 0.5 мм в пределах диапазона наблюдения около 400 м, и в таких случаях предпочтителен метод полярных координат, поскольку требуется только один тахеометр. Тесты коррекции рефракции с наблюдениями от двух плотин показали, что оба метода коррекции могут эффективно повысить точность мониторинга. Для коррекции наблюдения коррекция через ближайшую контрольную точку позволяет получить лучшие результаты коррекции.
Образец цитирования: Чжоу Дж., Ши Б., Лю Дж., Джу С. (2021 г.) Анализ точности мониторинга деформации плотины и коррекции рефракции с помощью роботизированного тахеометра.PLoS ONE 16 (5): e0251281. https://doi.org/10.1371/journal.pone.0251281
Редактор: Ахмед Манси Моза, Университетский колледж Аль-Мансур, Багдад, Ирак, ИРАК
Получено: 29 января 2021 г .; Одобрена: 23 апреля 2021 г .; Опубликовано: 6 мая 2021 г.
Авторские права: © 2021 Zhou et al. Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все соответствующие данные находятся в документе и его вспомогательных информационных файлах.
Финансирование: Финансирование Гуанлан Лю, 41
0, Национальный фонд естественных наук Китая; http://www.nsfc.gov.cn/ Финансируется Цзяньго Чжоу, Q201, Департамент образования провинции Хубэй; http://jyt.hubei.gov.cn/ Спонсор предоставил поддержку в виде исследовательских материалов для авторов [Цзяньго Чжоу, Гуанлан Лю], но не имел никакой дополнительной роли в дизайне исследования, сборе и анализе данных, принятии решений. опубликовать или подготовить рукопись.Коммерческие компании оказывали поддержку в виде заработной платы авторам [Бо Ши, Шуджун Джу], но не играли никакой дополнительной роли в дизайне исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи. Конкретные роли этих авторов сформулированы в разделе «Авторский вклад».Конкурирующие интересы: Авторы заявили, что конкурирующих интересов не существует. Коммерческая принадлежность не влияет на нашу приверженность политике PLOS ONE в отношении обмена данными и материалами.
1. Введение
Как одна из наиболее важных инженерных инфраструктур, плотины водохранилищ играют важную роль в борьбе с наводнениями, выработке электроэнергии и ирригации [1]. При эксплуатации плотин нельзя игнорировать безопасность, потому что в случае аварии они будут иметь разрушительные последствия для людей, имущества и окружающей среды. Мы были свидетелями нескольких таких случаев в истории [2]. Чтобы полностью понять здоровье плотины, необходим мониторинг безопасности плотины [3]. Мониторинг безопасности плотины проходит на протяжении всего ее жизненного цикла.На этапе планирования разрабатывается общий план системы мониторинга безопасности со списком и схемой расположения оборудования для мониторинга. А инструменты устанавливаются или закапываются в конструкцию плотины на этапе строительства. На этапе эксплуатации проводится периодический и специальный мониторинг для оценки безопасности плотины. Геодезические, геотехнические датчики и датчики окружающей среды могут использоваться для контроля деформации, внутреннего напряжения, просачивания, уровня воды и т. Д. [4]. Мониторинг деформаций — один из важнейших аспектов мониторинга безопасности плотин [5].С развитием геодезической технологии геодезические датчики, представленные уровнем, тахеометром, приемником глобальной навигационной спутниковой системы (GNSS), наземным лазерным сканером (TLS) и наземным радаром с синтезированной апертурой (GB-SAR), были применены к плотине. мониторинг деформаций [6].
Нивелир — надежный метод мониторинга вертикального смещения, который в настоящее время широко используется для мониторинга деформации плотин [7]. Однако это трудоемкий метод. Гидростатическое выравнивание — эффективная альтернатива для обеспечения непрерывного автоматического мониторинга вертикального смещения [8], но трудности с развертыванием ограничивают диапазон его мониторинга.Технология GNSS не требует видимости среди точек наблюдения. Он может осуществлять непрерывный трехмерный мониторинг смещения при любых погодных условиях, что дает ряд преимуществ при мониторинге деформации плотины [9, 10]. Однако на точность мониторинга сильно влияют видимость спутников и эффект многолучевого распространения. Технология наземного лазерного сканирования имеет хорошие перспективы применения в мониторинге деформаций, поскольку она может быстро получить плотное облако точек плотины и обеспечить полный анализ деформации плотины [11, 12].Из-за немного низкой точности одной точки, полученной TLS, например около 10 мм, когда TLS расположен на расстоянии около 100 м [13], высокоточный анализ деформации с помощью моделирования все еще является сложной задачей. Технология GB-SAR может обеспечить крупномасштабный и непрерывный пространственный охват результатов деформации на большом расстоянии, а точность ее мониторинга может достигать 0,1 мм [14]. В настоящее время он используется для мониторинга плотин [15, 16]. Основным недостатком GB-SAR является то, что можно получить только деформацию в зоне прямой видимости.К тому же оборудование дорогое.
Тахеометр — один из наиболее репрезентативных геодезических инструментов, играющий важную роль в области мониторинга деформаций. Он широко используется для мониторинга деформаций и мониторинга геологических опасностей плотин [17], мостов [18], туннелей [19] и других объектов гражданской инфраструктуры. В частности, с повышением точности и автоматизации тахеометра [20–22] рождение роботизированного тахеометра (RTS) делает его преимущества в непрерывном автоматическом мониторинге деформации более очевидными.Точность контроля горизонтальных и вертикальных смещений является ключом к успеху анализа деформации. Что касается мониторинга деформации с использованием тахеометров, точность мониторинга в туннелях была проанализирована и протестирована [23, 24]. Однако плотины несколько отличаются от туннелей, и обычно диапазон мониторинга шире. Следовательно, необходимо проанализировать точность мониторинга плотин, чтобы руководствоваться фактическим развертыванием системы мониторинга деформации плотины на основе роботизированных тахеометров.Более того, мониторинг деформации плотины более чувствителен к атмосферным условиям, которые могут привести к большим ошибкам в измерениях расстояний и углов, собранных тахеометром, из-за рефракции [25]. Атмосферная рефракция влияет на все виды систем дистанционного измерения [26, 27]. В некоторых исследованиях использовались метеорологические датчики на месте для создания моделей атмосферы для уточнения результатов наблюдений [28]. Главный недостаток таких методов — необходимость в дополнительных метеодатчиках. После внедрения системы непрерывного автоматического мониторинга деформации плотины с помощью роботизированных тахеометров в этом исследовании представлены математические модели для получения горизонтальных и вертикальных смещений и соответствующие формулы оценки точности.Что касается влияния атмосферной рефракции, описаны два подхода к корректировке результатов мониторинга без метеорологических измерений: корректировка наблюдений и корректировка координат. Точность мониторинга различных моделей мониторинга была проанализирована и сравнена посредством моделирования, и даны соответствующие предложения с учетом фактического развертывания. Эффективность двух методов коррекции рефракции была подтверждена наблюдениями с двух плотин.
2.Методология
Для непрерывной системы удаленного автоматического мониторинга деформации плотины на основе роботизированных тахеометров основной целью является измерение смещения насыпи плотины и откосов на обоих берегах, а также определение состояния здоровья конструкции плотины и ее окрестностей. .
В отличие от задач мониторинга внутри помещений или под землей, погода является важным фактором, который следует учитывать при мониторинге деформации плотины. Во-первых, длительное воздействие солнечного света, дождя и снега может вызвать коррозию тахеометра, если установка находится на открытом воздухе.Следовательно, необходимо построить комнату для наблюдения и установить в ней тахеометр. Комната для наблюдения открывает дверь только для того, чтобы тахеометр мог выполнять наблюдение с заданной частотой мониторинга, что защищает инструмент от суровых погодных условий и диких животных. Затем пункт станции должен быть оборудован метеорологическими датчиками, которые можно использовать для получения метеорологических данных в реальном времени не только для корректировки наблюдений, но и для определения того, подходят ли погодные условия для проведения наблюдений.Кроме того, в качестве автоматической системы мониторинга объект должен быть оборудован системами видеонаблюдения и сигнализации для обеспечения безопасности приборов. Кроме того, призмы также должны быть экранированы, чтобы обеспечить их долгосрочное использование в качестве отражателей. На рис. 1 показана типичная система мониторинга деформации плотины, основанная на роботизированных тахеометрах. Для расчетов смещения плоское смещение и вертикальное смещение обычно рассчитываются отдельно. Для расчета смещения плоскости используются метод полярных координат и метод прямого пересечения.Кроме того, вертикальное смещение в основном рассчитывается с помощью тригонометрического нивелирования.
2.1 Метод полярных координат
Поскольку зона наблюдения тахеометра мала, влияние кривизны земли незначительно при вычислении плоских координат точек наблюдения. Для метода полярных координат (рис. 2 (a)) тахеометр устанавливается в точке станции T с известными координатами плоскости ( X T , Y T ).Точка станции должна быть стабильной в течение периода мониторинга и должна быть удобна для точек наблюдения прибора. Контрольная точка R обычно находится в стабильной зоне, удаленной от зоны деформации, с известными координатами плоскости ( X R , Y R ). Функция контрольной точки — помочь ориентироваться тахеометру. Для каждой эпохи мониторинга тахеометр в точке станции T сначала нацеливается на контрольную точку R как на заднюю точку.Затем он поворачивается к точке наблюдения M , чтобы получить наблюдение за горизонтальным углом β , наблюдение за вертикальным углом γ и наблюдение за наклонным расстоянием S TM . Зная плоские координаты точки T и R , можно вычислить азимут точки TR , обозначенный как α TR . Кроме того, плоские координаты точки наблюдения M , обозначенные как ( S M , Y M ), могут быть вычислены с помощью следующих уравнений [29]: (1) где D TM обозначает горизонтальное расстояние от точки станции T до точки наблюдения M , а α TM обозначает азимут TM .
Игнорирование ошибок координат опорной точки R и точки станции T , а также без учета влияния рефракции и предположения, что точность точки мониторинга M связана только с наблюдениями, среднеквадратичные ошибки мониторинга точки M по оси X и оси Y оцениваются с использованием следующих правил распространения ошибок: (2) где, и, м β и м γ — номинальная точность S TM , β и γ , соответственно, обычно предоставляется производителем тахеометра. ρ = 206265 ”, которая является константой, используемой для преобразования радиана в градус.
Плоскостное смещение точки наблюдения M может быть получено путем сравнения координат i -й эпохи мониторинга с начальными координатами: (3)
Среднеквадратичная ошибка смещения плоскости может быть вычислена путем объединения уравнений (2) и (3) следующим образом: (4)
Из уравнения (4) видно, что для метода полярных координат точность смещения плоскости контрольной точки M не имеет ничего общего с наблюдением за горизонтальным углом β .Для данного инструмента наблюдения за вертикальным углом и наклонным расстоянием определяют точность мониторинга.
2.2 Метод прямого пересечения
Для метода прямого пересечения необходимы как минимум два тахеометра, чтобы обеспечить смещение точки мониторинга в плоскости [30]. Два тахеометра установлены в точках стабильной станции T 1 и T 2 с известными координатами плоскости и, соответственно (рис. 2 (b)). В каждую эпоху мониторинга два тахеометра сначала видят друг друга как заднюю точку, а затем их телескопы поворачиваются к точке наблюдения M , чтобы получить соответствующий горизонтальный угол β 1 , β 2 , вертикальный угол γ 1 , γ 2 и наблюдения наклонного расстояния.Поскольку здесь требуются только плоские координаты точки наблюдения M , для упрощения построения уравнения наблюдения применяется наблюдение горизонтального расстояния D TM = S TM * cosγ . следует: (5) где представляют собой остатки наблюдений, указывают неизвестные параметры (которые необходимо определить) и координаты точки наблюдения M соответственно, а обозначают азимуты T 1 T 2 и T 2 T 1 , которое можно рассчитать на основе известных координат и.
Записав уравнения наблюдения в матричной форме, линеаризуя их с помощью ряда Тейлора и усекая их в первом порядке, мы можем получить следующее уравнение: (6)
, где L символизирует матрицу наблюдений;
v обозначает матрицу остатков;
обозначает матрицу неизвестных параметров, которая должна быть определена, которая включает в себя:
X 0 представляет собой приблизительные значения, которые могут быть вычислены в соответствии с необходимыми наблюдениями; и указывает исправления для X 0 .
С помощью весовой матрицы P наблюдений, которая может быть получена через точность тахеометра, можно оценить матрицу неизвестных параметров, ее матрицу кофакторов и коэффициент апостериорной дисперсии в соответствии с принципом корректировки наименьших квадратов. Аналогично методу полярных координат, смещение плоскости контрольной точки M может быть получено путем сравнения с начальными координатами. Среднеквадратичную ошибку смещения плоскости можно рассчитать следующим образом: (7) где — диагональные элементы.
2.3 Расчет вертикального смещения
При расчете вертикального смещения точки мониторинга с помощью тахеометра используется тригонометрическое нивелирование [31]. При отсутствии одновременных взаимных наблюдений влияние кривизны и рефракции необходимо учитывать при расчете вертикального смещения точки наблюдения. Как показано на рис. 3, высота точки стабильной станции T известна как H T , а тахеометр в точке станции T наводится на цель F в точке наблюдения M до получить наклонное расстояние S и вертикальный угол γ наблюдений в каждую эпоху мониторинга.Хотя линия визирования преломляется к цели F , телескоп указывает на G , таким образом, S * sinγ = EG требует поправки на рефракцию r = FG . Эффект кривизны c = BE — это разница между горизонтальной линией и линией уровня, пересекающей центр инструмента I в точке мониторинга M . Высота инструмента и цели выражается как h i и h v соответственно.Тогда высоту H M точки наблюдения M можно рассчитать следующим образом: (8)
Обычно эффект кривизны и преломления можно приблизительно рассчитать как и. Здесь D обозначает горизонтальное расстояние, R обозначает радиус Земли, а K обозначает коэффициент преломления. Сравнивая высоту M с начальным значением, можно рассчитать вертикальное смещение.Для непрерывной автоматической системы мониторинга инструмент и цели мониторинга являются фиксированными. Изменения горизонтального расстояния D очень малы относительно радиуса Земли R . Тогда высота инструмента h i и цели h v и влияние кривизны c могут быть нейтрализованы при расчете вертикального смещения. То есть они не являются факторами, влияющими на точность.Однако на коэффициент преломления K влияют метеорологические условия, морфология земли и другие сложные факторы. Он может существенно меняться в разные эпохи мониторинга. Следовательно, при вычислении вертикального смещения необходимо скорректировать эффект рефракции, чтобы обеспечить точность мониторинга. Предполагая, что влияние рефракции было исправлено, среднеквадратическая ошибка вертикального смещения может быть рассчитана на основе уравнения (9): (9)
3.Поправка на рефракцию
Под влиянием изменений температуры, влажности и давления воздуха распределение плотности атмосферы в зоне наблюдения обычно неоднородно как в вертикальной, так и в горизонтальной плоскостях. В особенности для крупных плотин гидроэлектростанций, построенных в районе альпийского ущелья, топографический фактор делает метеорологические условия очень сложными, что приводит к чрезвычайно неоднородному распределению плотности атмосферы. Затем для длительного непрерывного автоматического мониторинга деформации плотины с помощью роботизированных тахеометров рефракция, вызванная неравномерной плотностью атмосферы, оказывает значительное влияние на измерения угла и расстояния.Хотя взаимное наблюдение может устранить ошибку рефракции, оно нецелесообразно для автоматического мониторинга. Важно найти способ исправить эффект рефракции, чтобы сохранить точность мониторинга. Традиционный метод заключается в создании модели атмосферы для описания изменения показателя преломления в космосе. Вместе с измерениями угла и расстояния одновременно измеряются температура, влажность и давление воздуха, которые используются для внесения поправок в соответствии с определенной моделью атмосферы.Недостатком метода коррекции на основе модели атмосферы является необходимость в метеорологических датчиках высокой точности. Более того, метеорологические измерения в точке станции не отражают атмосферные условия на всей трассе. Вместо этого, используя известные стабильные точки в качестве эталона, измерения в направлении точек мониторинга могут быть скорректированы без метеорологических данных. Принцип действия аналогичен принципу дифференциального позиционирования GNSS.
При развертывании опорной сети мониторинга деформаций выбираются и строятся некоторые устойчивые точки для покрытия зоны мониторинга, которые могут использоваться для корректировки наблюдений.Фиксированные расстояния и углы между точкой станции и этими точками рассматриваются как опорные. В каждую эпоху мониторинга наблюдения от точки станции до точек мониторинга и этих контрольных точек получаются последовательно. Считается, что различия между фиксированными значениями и данными наблюдений в направлении контрольных точек в основном вызваны изменениями метеорологических условий. Поскольку одна эпоха мониторинга, проводимая с помощью роботизированного тахеометра, занимает короткое время, предполагается, что влияние метеорологических условий на наблюдения в направлении контрольных точек аналогично влиянию точек мониторинга.И эти различия для опорных точек можно использовать для корректировки наблюдений в направлении точек мониторинга с помощью соответствующих моделей, чтобы исключить влияние рефракции. В зависимости от режима коррекции коррекция может проводиться по наблюдениям за расстоянием и углом, либо координаты корректируются напрямую.
3.1 Коррекция расстояния
В эпоху мониторинга i тахеометр в точке станции T получает наблюдение расстояния d ( r , i ) до контрольной точки R .Поскольку точка станции и контрольная точка считаются стабильными с известными координатами, расстояние между ними фиксируется как d ( r ). Более того, можно считать, что разница между d ( r ) и d ( r , i ) вызвана изменениями метеорологических условий. Поправочный коэффициент расстояния Δ d ( r , i ) можно рассчитать следующим образом: (10)
Если измеряется необработанное расстояние наблюдения d ( м , i ) от точки станции T до точки мониторинга M в ту же эпоху мониторинга, скорректированное расстояние между ними составляет: (11)
3.2 Коррекция горизонтального угла
При мониторинге деформации значение деформации обычно определяется относительно первой эпохи мониторинга. Тогда измерение в горизонтальном направлении β ( r ) в направлении опорной точки R в первую эпоху мониторинга может быть принято за эталон. Разница Δ β ( r , i ) между измерением β ( r , i ) в эпоху мониторинга i и β ( r ) может быть получена как: (12)
Разница Δ β ( r , i ) в основном вызвана изменением нулевого направления горизонтального круга и атмосферной рефракцией в горизонтальной плоскости, которая оказывает такое же влияние на наблюдение за горизонтальным углом β ( м , и ) в сторону точки наблюдения M в ту же эпоху мониторинга.Δ β ( r , i ) необходимо вычесть из β ( m , i ) для скорректированного измерения горизонтального угла: (13)
3.3 Коррекция разницы высот
Основная функция вертикального угла — вычисление разницы высот между точками. Следовательно, мы рассматриваем поправку на разницу высот, а не на вертикальный угол. Разница высот между точкой стабильной станции T и контрольной точкой R фиксируется как h ( r ), а разница высот h ( r , i ) может быть рассчитана на основе дистанционное наблюдение d ( r , i ) и наблюдение вертикального угла γ ( r , i ) в эпоху мониторинга i .Разница между h ( r , i ) и h ( r ) в значительной степени вызвана кривизной и рефракцией, а поправочный коэффициент C обычно определяется следующим образом: (14)
Поскольку каждая эпоха мониторинга занимает короткое время, считается, что кривизна и рефракция имеют одинаковое влияние как на опорную точку R , так и на точку мониторинга M . Затем на основе наблюдения расстояния d ( м , i ) и наблюдения вертикального угла γ ( м , и ) до точки наблюдения M в эпоху мониторинга i , скорректированная высота разницу можно рассчитать следующим образом: (15)
После корректировки наблюдений в направлении точек мониторинга можно вычислить координаты точек мониторинга и получить соответствующие смещения.
3,4 Коррекция координат
Вместо исправления наблюдений при коррекции координат используются нескорректированные наблюдения, чтобы сначала вычислить координаты опорных точек. Различия между вычисленными координатами и известными координатами считаются результатом преломления. Затем различия можно использовать для корректировки координат точек мониторинга, рассчитанных на основе необработанных наблюдений при правильном допущении.
Для опорной точки R с известными координатами ( X R , Y R , H R ) приблизительные координаты ( X
34
34 ( i ), Y R ( i ), H R ( i )) в эпоху мониторинга i можно рассчитать по необработанным наблюдениям с точки станции T и принципы, упомянутые во втором разделе.Различия между ними, которые, как считается, в основном вызваны рефракцией, можно рассчитать как: (16)
Таким же образом приблизительные координаты ( X M ( i ), Y M ( i ), H M i1343 911 )) точки мониторинга M в ту же эпоху мониторинга можно рассчитать с помощью необработанных наблюдений по направлению к ней. А разности, вычисленные в уравнении (16), используются для корректировки приблизительных координат точки мониторинга M и, следовательно, для получения исправленных координат.
4. Анализ данных
4.1 Анализ точности
Точность мониторинга смещения плотин с использованием тахеометра была проанализирована посредством моделирования. Во-первых, была проанализирована и сравнена точность мониторинга горизонтального смещения с использованием методов полярных координат и прямого пересечения. Затем была проанализирована точность контроля вертикального смещения при тригонометрическом нивелировании. При моделировании точность измерения дальности была установлена как м S = 0.6 мм + 1 × 10 −6 S, а точность измерений в горизонтальном и вертикальном направлениях была установлена как м β = м γ = 0,5 дюйма, что соответствует обычно используемому Leica Nova Роботизированный тахеометр TM50 для мониторинга деформации плотин. Обратите внимание, что эффект рефракции здесь не учитывался.
Для метода полярных координат точность смещения точки наблюдения в плоскости в основном зависела от наблюдений за вертикальным углом и наклонным расстоянием, когда прибор был предоставлен в соответствии с предыдущим теоретическим выводом.Затем были проанализированы среднеквадратические ошибки смещений плоскости при различных вертикальных углах и наклонных расстояниях. Вертикальный угол изменялся от 0 ° до 60 °, а наклонное расстояние варьировалось от 0 до 1000 м (рис. 4). Из рисунка видно, что при фиксированном вертикальном угле среднеквадратичная ошибка смещения плоскости увеличивалась с увеличением наклонного расстояния. Чтобы обеспечить точность смещения точки наблюдения по плоскости, необходимо было ограничить наклонное расстояние от точки станции до точки наблюдения.Когда наклонное расстояние оставалось фиксированным, среднеквадратическая ошибка смещения плоскости показывала тенденцию к уменьшению с увеличением вертикального угла. Это произошло потому, что горизонтальное расстояние уменьшалось с увеличением вертикального угла. Однако для фактического мониторинга не рекомендуется увеличивать вертикальный угол для повышения точности смещения плоскости, поскольку больший вертикальный угол приведет к большей атмосферной рефракции для наблюдений. Из-за симметрии точность смещения плоскости при изменении вертикального угла от 0 ° до -60 ° соответствовала таковой при изменении вертикального угла от 0 ° до 60 °.
Для метода прямого пересечения при анализе точности смещения плоскости точки мониторинга сценарий моделирования был задан следующим образом: расстояние между двумя точками станции T 1 и T 2 составило 100 м. , а соответствующие координаты были (0, -50) и (0, 50). В соответствии с номинальной точностью роботизированного тахеометра Leica Nova TM50 были смоделированы наблюдения за горизонтальным углом и расстоянием между точками станции и точкой мониторинга.Затем оценивалось смещение точки наблюдения в плоскости и оценивалась точность по принципу уравнивания по методу наименьших квадратов. С учетом симметрии наблюдений оценивались только среднеквадратические ошибки смещений плоскостей для точек мониторинга, расположенных в первом квадранте. На рис. 5 (а) показано, что если среднюю точку двух точек станции рассматривать в качестве эталона, среднеквадратичные ошибки смещений плоскостей будут почти одинаковыми, когда расстояния от точек мониторинга до эталонной точки будут равны.Среднеквадратичная ошибка смещения плоскости для точки наблюдения увеличивалась с увеличением расстояния до точки привязки. Чтобы лучше понять влияние расстояния между точками станций на точность плоских смещений точек мониторинга, были выбраны четыре репрезентативных точки мониторинга ((200, 200), (400,400), (600, 600) и (800, 800)). для анализа. Если взять начало координат в качестве средней точки, расстояние между двумя точками станции варьировалось от 100 м до 1000 м по оси ординат с интервалом 100 м.Рис. 5 (b) показывает, что различия в точности смещения плоскости четырех репрезентативных точек мониторинга на разных интервалах между точками станций не превышали 0,5 мм. Можно сделать вывод, что расстояние между точками станций мало влияет на точность смещения плоскости. Приведенные выше результаты анализа предоставили справочные материалы для размещения точек при реальном мониторинге плотины.
Для сравнения точности метода полярных координат и метода прямого пересечения при вычислении плоских смещений точек мониторинга было проведено моделирование.Настройка сценария моделирования была аналогична предыдущему моделированию. Здесь расстояние между двумя точками станции T 1 и T 2 было установлено равным 400 м, а соответствующие координаты были (0, −200) и (0, 200). Затем рассчитывались среднеквадратические ошибки смещений плоскостей для точек мониторинга, расположенных в первом квадранте. Для обеспечения согласованности сравнения вертикальный угол был установлен как γ = 0 для метода полярных координат, что означало, что наклонное расстояние было равно горизонтальному расстоянию.Из предыдущего анализа можно было узнать, что среднеквадратичная ошибка смещения плоскости, рассчитанная методом полярных координат, увеличивалась с увеличением расстояния от точки мониторинга до точки станции. Затем для метода полярных координат была выбрана точка станции T 2 , поскольку она была ближе к точкам мониторинга, расположенным в первом квадранте. На рис. 6 (а) показаны среднеквадратические ошибки смещений плоскостей, рассчитанные с помощью метода прямого пересечения, который дополнительно доказал, что расстояние между точками станций мало влияет на точность смещения плоскости, поскольку результат был аналогичен результатам на рис. 5 (а).На рис. 6 (б) показаны среднеквадратические ошибки плоских смещений, рассчитанные методом полярных координат. Из рисунков видно, что точность смещения плоскости, полученная методом прямого пересечения, была лучше, чем у метода полярных координат. Более того, видно, что зазор увеличивался по мере увеличения расстояния от точки станции T 2 до точки наблюдения, причем не более 2 мм. В целом преимущество метода полярных координат заключалось в том, что для проведения мониторинга требовалась только одна тахеометр.Следовательно, его лучше применять в ситуациях, когда расстояния между точкой станции и точками мониторинга были небольшими. Метод прямого пересечения потребовал участия нескольких тахеометров. В этом методе среднеквадратическая ошибка положительно коррелировала с расстоянием от точки мониторинга до контрольной точки. В основном это подходило для ситуаций, когда точки наблюдения были удалены от точек станций и требовалась высокая точность мониторинга.
Когда тригонометрическое нивелирование применялось для расчета вертикального смещения точки наблюдения, на точность вертикального смещения в основном влияли наблюдения за вертикальным углом и наклонным расстоянием, когда эффект рефракции не принимался во внимание.Затем были проанализированы среднеквадратические ошибки вертикальных смещений при различных вертикальных углах и наклонных расстояниях. Вертикальный угол изменялся от 0 ° до 60 °, а наклонное расстояние варьировалось от 0 до 1000 м (рис. 7). Из рисунка видно, что при фиксированном вертикальном угле среднеквадратичная ошибка вертикального смещения увеличивалась с увеличением наклонного расстояния. Когда наклонное расстояние было коротким (менее 400 м), среднеквадратическая ошибка вертикального смещения положительно коррелировала с вертикальным углом.Однако, когда наклонное расстояние было большим, среднеквадратичная ошибка вертикального смещения демонстрировала тенденцию к уменьшению с увеличением вертикального угла. Тот же результат может быть получен при изменении вертикального угла от 0 ° до -60 °. Для фактического мониторинга необходимо ограничить вертикальный угол, чтобы уменьшить эффект рефракции.
4.2 Корректирующие испытания
Чтобы проверить эффективность коррекции рефракции, для испытаний и анализа были выбраны две гидроэлектростанции под названием Жентуба I и Даганшань в бассейне реки Даду, расположенной в провинции Сычуань, Китай.В соответствии с развертыванием системы мониторинга деформации плотины, тест корректировки наблюдений был проведен на ГЭС Жентуба I, а тест корректировки координат был проведен на Дагангшанской ГЭС.
Плотина ГЭС Жентуба I представляет собой бетонную гравитационную плотину, расположенную в среднем и нижнем течении реки Даду. Как показано на Рис. 8 (а), максимальная высота плотины составляет 86,5 м, высота гребня плотины составляет 626,5 м, а общая длина гребня плотины составляет 317 м.55 м. Для обеспечения безопасной эксплуатации плотины была создана автоматизированная система контроля деформаций с использованием роботизированных тахеометров для отслеживания перемещений тела плотины и откосов на обоих берегах. При проведении теста коррекции наблюдения, подверженного влиянию рефракции, установленная точка станции, реперная точка и точки наблюдения были объединены в единицу. Роботизированный тахеометр Leica Nova TM50 ( м s = 0,6 мм + 1 × 10 −6 S, м β = м γ = 1 ”) был установлен на известном станционном пункте T 1 на левом берегу (рис. 8 (б)).Известная опорная точка R 1 вдали от зоны наблюдения на правом берегу была выбрана в качестве задней точки, и были последовательно получены необработанные измерения расстояния и угла в направлении точек наблюдения M 1 ~ M 6 . Затем методом полярных координат были рассчитаны координаты точек мониторинга. В то же время наблюдения в направлении опорной точки R 1 были использованы для корректировки наблюдений в направлении точек мониторинга в ту же эпоху мониторинга.Соответствующие координаты были рассчитаны с учетом исправленных наблюдений. Весь тест длился около 17 часов с утра до вечера. Всего было проведено 17 эпох мониторинга с интервалом в один час. Во время тестирования предполагалось, что точки мониторинга оставались стабильными. То есть их смещения были нулевыми. Среднеквадратичные ошибки (MSE) смещений плоскостей для точек мониторинга с различными наблюдениями показаны в таблице 1.
Таблица 1 показывает, что MSE плоских смещений для точек мониторинга, рассчитанных непосредственно на основе необработанных наблюдений, была намного больше, чем теоретическая ситуация, предполагающая отсутствие рефракции.Разница увеличивалась с увеличением расстояния от точки наблюдения до точки станции. Это доказало, что рефракция оказывает существенное отрицательное влияние на точность смещения плоскостей для точек наблюдения. Следовательно, это необходимо учитывать в реальных задачах мониторинга. После взятия R 1 в качестве эталона для корректировки необработанных наблюдений в направлении точек мониторинга точность смещений плоскостей для точек мониторинга, рассчитанных с помощью скорректированных наблюдений, была эффективно повышена.Оказалось, что чем ближе точка наблюдения находится к контрольной точке, используемой для коррекции, тем лучше может быть достигнут эффект коррекции, что может быть вызвано схожестью эффекта преломления. С другой стороны, поскольку вертикальные углы от точки станции до точек мониторинга были небольшими в тесте, расстояние было основным фактором, влияющим на эффект коррекции. Из таблицы 1 видно, что чем ближе расстояние от точки мониторинга до точки станции, тем меньше качество коррекции.В связи с этим при корректировке наблюдений в сторону точки мониторинга следует выбирать точку отсчета ближе к точке мониторинга, а при необходимости проводить коррекцию в группах. При этом для эффективной коррекции точки мониторинга не должны располагаться слишком близко к точке станции при развертывании системы мониторинга. Для поправки на перепад высот значения MSE вертикальных смещений для точек мониторинга с разными типами наблюдений показаны в таблице 2.Таблица демонстрирует аналогичную тенденцию для смещений плоскостей.
Даганшанская плотина гидроэлектростанции представляет собой бетонную арочную плотину с двойным изгибом, расположенную в среднем течении реки Даду с максимальной высотой плотины 210 м. В 2019 году была создана автоматизированная система мониторинга деформации на базе роботизированных тахеометров, а по обеим сторонам пролива были развернуты две станции для отслеживания смещения склонов. Для анализа влияния коррекции координат на рефракцию использовались данные, собранные станционной точкой T 3 на правом берегу.Как показано на Рис. 9 (a), роботизированный тахеометр в точке станции T 3 взял точку станции T 4 на том же берегу, что и задняя точка, чтобы получить наблюдения за углом и расстоянием до опорных точек и точек наблюдения. на левом берегу. Согласно фактическому групповому наблюдению, наблюдения за четырьмя устойчивыми опорными точками R 1 ~ R 4 , расположенными на склоне левого берега, и шестью контрольными точками M 1 ~ M 6 участвовал в анализе.Их распределение можно увидеть на рис. 9 (б). Всего было использовано 23 наблюдения эпох мониторинга в течение примерно двух недель, из которых некоторые эпохи мониторинга были исключены, поскольку наблюдения в некоторых точках не были собраны. Наблюдения в каждую эпоху мониторинга использовались для расчета примерных координат опорных и мониторинговых точек методом полярных координат. Затем, в сочетании с известными координатами контрольных точек, различия в координатах каждой контрольной точки использовались для корректировки приблизительных координат контрольных точек по очереди.Точно так же точки мониторинга считались стабильными в течение периода мониторинга. Если исходные координаты каждой точки взяты за основу, среднеквадратические ошибки (MSE) плоских смещений для точек мониторинга в различных ситуациях показаны в таблице 3.
Таблица 3 показывает, что, поскольку расстояния от каждой точки мониторинга до точки станции составляли около 700 м, MSE в смещении плоскости для каждой точки мониторинга составляла около 7-8 мм в теоретической ситуации, предполагающей отсутствие рефракции.Когда необработанные наблюдения использовались для прямого расчета плоских смещений точек мониторинга, MSE увеличивались в несколько раз по сравнению с теоретической ситуацией. В целом точность смещения плоскости точек мониторинга была улучшена, когда корректировка координат проводилась с каждой из четырех опорных точек. Для некоторых точек мониторинга точность смещения плоскости после коррекции была даже лучше, чем теоретическая ситуация, например, при использовании контрольной точки R 1 для исправления точек мониторинга M 4 и M 5 .Однако не существовало очевидного правила, по которому можно было бы использовать контрольную точку для получения наилучшего корректирующего эффекта. Казалось, что ближайшая контрольная точка к точке мониторинга может обеспечить наилучший эффект коррекции для метода коррекции координат на основе результатов, приведенных в таблице 3. Следовательно, необходимо изучить, как использовать несколько контрольных точек для внесения всесторонних коррекций в точки мониторинга. Это необходимо для достижения наилучшего результата коррекции. Кроме того, СКО смещения плоскости для точки наблюдения M 2 при неисправленной и исправленной ситуации значительно превысили определенный предел.Основная причина может заключаться в том, что исходные координаты точки наблюдения M 2 были получены неверно.
5. Заключение
Это исследование в основном сосредоточено на вопросах точности мониторинга и коррекции рефракции при непрерывном автоматическом мониторинге деформации плотины на основе роботизированных тахеометров. Анализ моделирования показал, что для роботизированного тахеометра с заданной точностью точность смещения плоскости точки наблюдения, рассчитанная методом прямого пересечения, была лучше, чем методом полярных координат.Но на определенном расстоянии (около 400 м) разница между ними была менее 0,5 мм. Затем для мониторинга на коротком расстоянии предпочтительнее использовать метод полярных координат, поскольку требуется только один тахеометр, что может сэкономить Система наблюдения. Расстояние между двумя тахеометрами обычно не влияет на точность смещения для метода прямого пересечения, и его можно применять для выполнения задач мониторинга с большими расстояниями и требованиями высокой точности.Фактические испытания поправки на рефракцию на двух плотинах гидроэлектростанций продемонстрировали, что и наблюдения, и поправки координат могут эффективно уменьшить влияние рефракции и могут повысить точность мониторинга. Для поправок наблюдения: чем ближе к контрольной точке, тем лучше эффект поправки. Таким образом, рекомендуется проводить групповые наблюдения в соответствии с условиями на месте. В то время как для коррекции координат для корректирующего воздействия одной опорной точки на точку мониторинга не хватало определенных правил.Тогда цель нашего будущего исследования — использование нескольких контрольных точек для достижения лучшего корректирующего эффекта. Более того, получение надежных начальных координат точек мониторинга также имеет решающее значение, поскольку это влияет на точность смещений.
Благодарности
Авторы благодарны редактору и анонимным рецензентам за их ценные предложения, исправления и комментарии, которые помогли улучшить исходную рукопись.
Список литературы
- 1.Калкан Ю. Геодезический мониторинг деформаций плотины Ататюрк в Турции. Арабский журнал наук о Земле. 2014; 7: 397–405.
- 2. Сайт ASDSO Dam Failures. https://damfailures.org/case-study/.
- 3. Chen S, Gu C, Lin C, Wang Y и Hariri-Ardebili MA. Прогнозирование, мониторинг и интерпретация потока утечки через плотину с помощью машины экстремального обучения с адаптивным ядром. Измерение. 2020; 166: 108161.
- 4. Йигит CO, Алкей С. и Джейлан А.Реакция смещения бетонной арочной дамбы на сезонные колебания температуры и повышение уровня водохранилища в течение первого периода заполнения: данные геодезических данных. Геоматические природные опасности и риски. 2015: 1–17.
- 5. Акоста Л.Е., Де Лейси М., Рамос М.И. и др. Исследование смещений насыпной плотины на основе высокоточного геодезического мониторинга и численного моделирования. Датчики. 2018; 18: 1369. pmid: 29702627
- 6. Скайони М., Марселла М., Крозетто М., Торнаторе В. и Ван Дж.Геодезические и дистанционные датчики для контроля деформации плотин. Датчики. 2018; 18: 3682. pmid: 30380693
- 7. Lacy MCD, Ramos MI, Gil AJ и др. Контроль вертикальных деформаций с помощью высокоточного геодезического нивелирования. Пример: плотина Ареносо (юг Испании). Журнал прикладной геодезии. 2017; 11: 31–41.
- 8. Камински В., Маковска К. Концепция геодезического анализа результатов измерений, полученных с помощью гидростатического нивелирования. Науки о Земле.2019; 9. pmid: 31929894
- 9. Барзаги Р., Каззанига Н., Де Гаэтани К., Пинто Л. и Торнаторе В. Оценка и сравнение деформации плотины с использованием классических методов и методов GNSS. Датчики 2018; 18: 756. pmid: 29498650
- 10. Конакоглу Б., Чакир Л. и Йилмаз В. Мониторинг деформации бетонной плотины: тематическое исследование плотины Деринер, Артвин, Турция. Геоматика, природные опасности и риски. 2020; 11: 160–77.
- 11. Сюй Х, Ли Х, Ян Х, Ци С. и Чжоу Дж.Интеграция наземного лазерного сканирования и моделирования Нурбса для мониторинга деформации земляно-каменной плотины. Датчики. 2019; 19: 22.
- 12. Рамос-Алькасар Л., Марчамало-Сакристан М. и Мартинес-Марин Р. Оценка и построение графиков средней точности TLS в полевых условиях: применение для мониторинга плотин. Международный журнал гражданского строительства. 2017; 15: 299–307.
- 13. Пак Х., Ли Х., Адели Х. и Ли И. Новый подход к мониторингу состояния конструкций: наземное лазерное сканирование.Компьютерное проектирование строительства и инфраструктуры. 2007; 22: 19–30.
- 14. Ноферини Л., Пьерачини М., Мекатти Д., Макалузо Дж., Лузи Дж. И Ацени К. Долгосрочный мониторинг оползней с помощью наземного радиолокационного интерферометра с синтезированной апертурой. Международный журнал дистанционного зондирования. 2006; 27: 1893–905.
- 15. Цю З, Цзяо М., Цзян Т. и Чжоу Л. Мониторинг деформации структуры плотины с помощью подхода GB-InSAR. Доступ IEEE. 2020; 8: 123287–96.
- 16. Ван П, Син Си и Пан Х.Мониторинг деформации поверхности плотины водохранилища с помощью дифференциального GB-InSAR на основе подмножеств изображений. Датчики. 2020; 20: 396. pmid: 31936713
- 17. Яо LB, Sun HL, Zhu LX и Zhou YY. Разработка и внедрение системы мониторинга деформации оползня на плотине Фунчуньцзян. Обзор обзора. 2014; 46: 444–52.
- 18. Юй Джи, Чжу П, Сюй Б и Мэн XL. Экспериментальная оценка роботизированного тахеометра с высокой частотой дискретизации для мониторинга динамических характеристик моста. Измерение.2017; 104: 60–9.
- 19. Луо YB, Чен JX, Си WZ, и др. Применение тахеометра с RDM для отслеживания смещения туннелей. Журнал производительности построенных объектов. 2017; 31.
- 20. Шерер М. и Луис Лерма Дж. От обычного тахеометра к перспективному фотограмметрическому сканирующему тахеометру с использованием изображений: всесторонний обзор. Журнал геодезической инженерии. 2009; 135: 173–8.
- 21. Вагнер А. Новый подход к геомониторингу с использованием современных тахеометров и изображений RGB + D.Измерение. 2016; 82: 64–74.
- 22. Эрхарт М. и Линхарт В. Точные измерения с помощью тахеометров с использованием изображений и их предпосылки. Журнал геодезической инженерии. 2017; 143: 04016024.
- 23. Луо YB, Чен JX, Си WZ, и др. Анализ точности смещения туннеля с помощью тахеометра. Измерение. 2016; 83: 29–37.
- 24. Чжоу Дж., Сяо Х., Цзян В., Бай В. и Лю Г. Автоматический мониторинг смещения туннеля метро с помощью роботизированного тахеометра.Измерение. 2020; 151: 107251.
- 25. Вшивкова О.В., Калугин И.В. Поправки на рефракцию из комплексных измерений параметров атмосферы для электронной тахеометрии. Обзор обзора. 2013; 44: 68–75.
- 26. Доржи П. и Фирнс П. Коррекция атмосферных данных геостационарных спутниковых данных Himawari-8 для картирования общих взвешенных отложений: тематическое исследование прибрежных вод Западной Австралии. Журнал ISPRS по фотограмметрии и дистанционному зондированию. 2018; 144: 81–93.
- 27. Yue JP, Qiu ZW, Wang XQ и Yue S. Коррекция атмосферной фазы с использованием постоянных рассеивателей в наземной радиолокационной интерферометрии. Журнал прикладного дистанционного зондирования. 2016; 10.
- 28. Zuo X, Yu H, Zi C и Xu X. Модель коррекции атмосферных возмущений при мониторинге деформации склонов с использованием системы IBIS-L. Кластерные вычисления. 2016; 19: 2157–67.
- 29. Шофилд В. и Брич М. Инженерные изыскания. CRC Press, 2007.
- 30.Чэнь З., Цзэн В. и Чжан Л. Применение метода прямого пересечения при измерении водных свайных фундаментов. Геоматика и пространственные информационные технологии, 2009: 04.
- 31. Xu Y, Chen Y, Guan X и др. Подход к минимизации влияния изменчивой среды наблюдений на тригонометрическое нивелирование морских переходов на большие расстояния. Журнал геодезической инженерии, 2020, 146 (4): 04020018.